
The list of commands is comprised of 4 basic classes. Class 1 commands set up a figure in an array. the figure must be loaded into an array before it can be drawn. Class 2 commands manipulate the coordinates of an array in some way. Once these commands are invoked, the original array is, of course, destroyed. If it is desired to save these values, they should be transferred into a new array and operated upon there. Class 3 commands perform arithmetic operations upon the 8 variables and define instruction loops. Class 4 commands deal with the plotter itself.
Comments may be placed on every card from columns 61 - 80. However, a special card may be devoted to this purpose by simply putting a C in column 1, comments in columns 61 to 80. Blank commands are ignored. An invalid command ends the program and causes an error message to be printed. All cards are printed out on the users' computer output in the order that they are executed. This is quite helpful when debugging a sequence of commands for a picture.
Commands must always be punched in the format described above. In the text that follows, a less exact format is used with spaces separating the individual fields. A parameter that is not applicable to the command being described is replaced by an asterisk. For example:-
RECT S ARR * X Y Z LNGTH HGT
indicates that the command RECT does not require the figure parameter to be used.
The S and ARR variables always refer to the stack and array to which the picture is being defined.
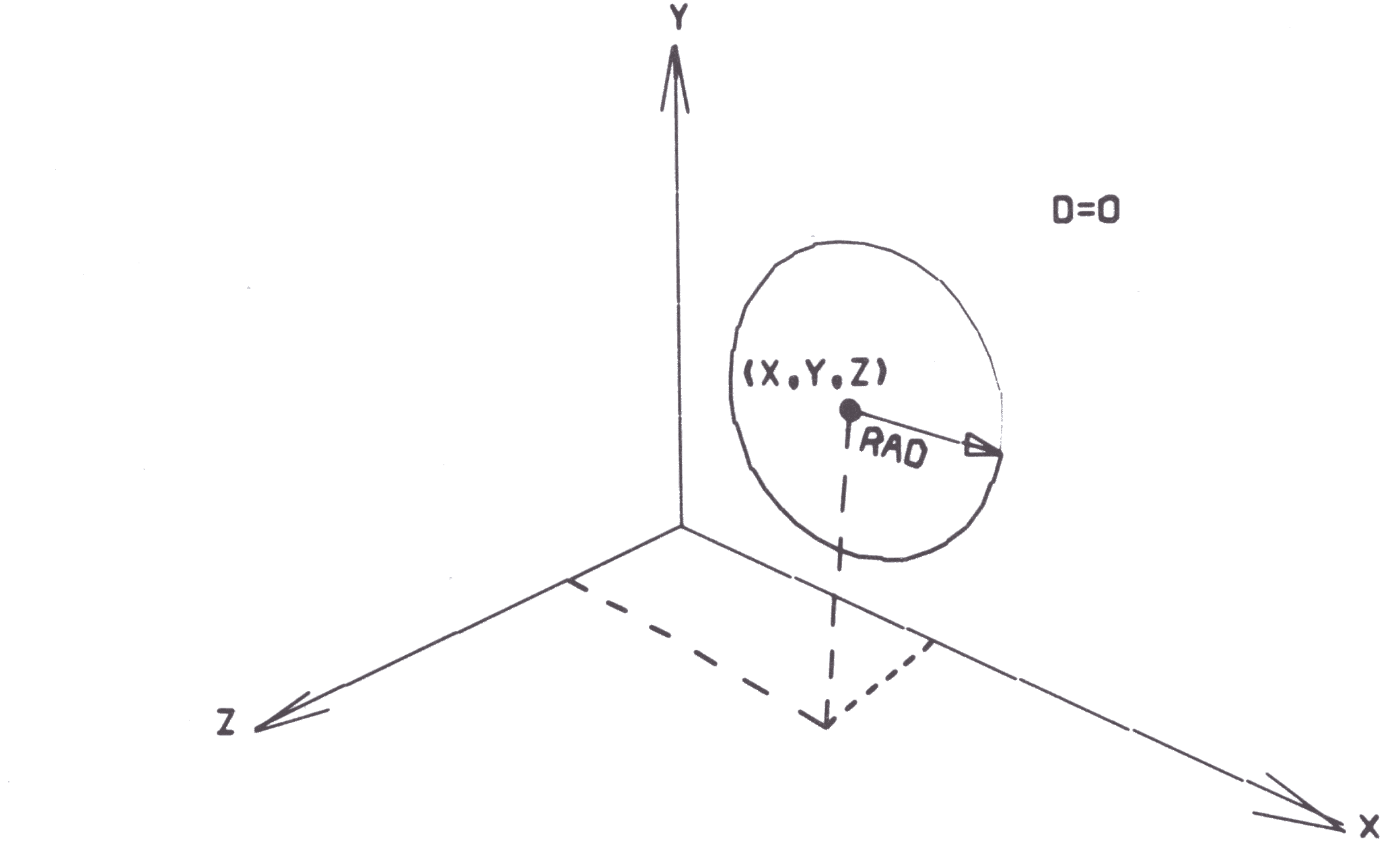
CIRCL S ARR D X Y Z RAD
defines a circle centred at (X,Y,Z) of radius RAD, in a plane parallel to the x-y plane. If D is nonzero, the circle is dashed. The array is comprised of 37 points, which produces 36 straight lines. the first point lies to the right of the centre, and successive points fall every 10 degrees counter clockwise around the circle.
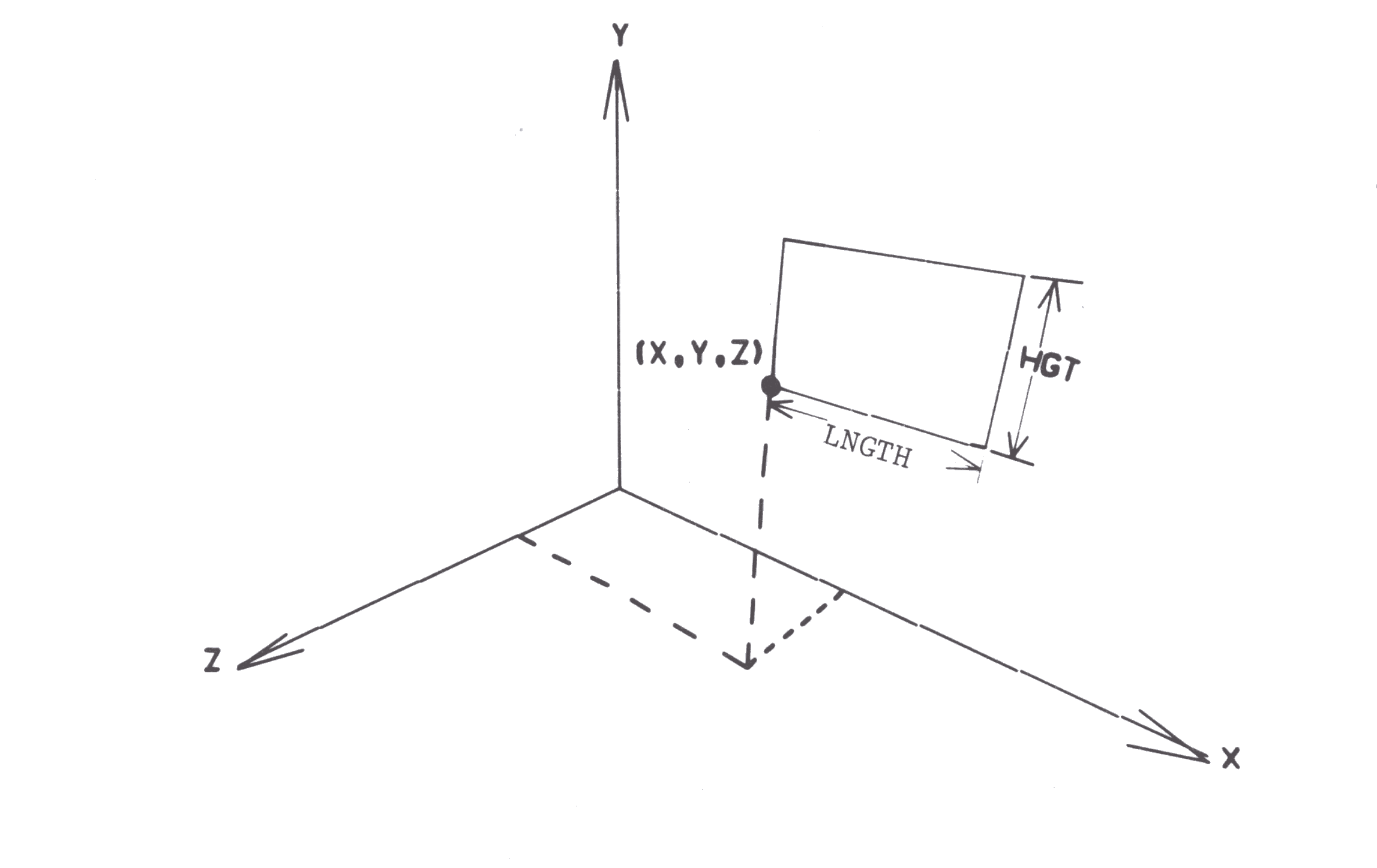
RECT S ARR * X Y Z LNGTH HGT
defines a rectangle with lower left hand corner at (X,Y,Z) of length, LNGTH and height, HGT. This figure lies in a plane parallel to the x-y plane.
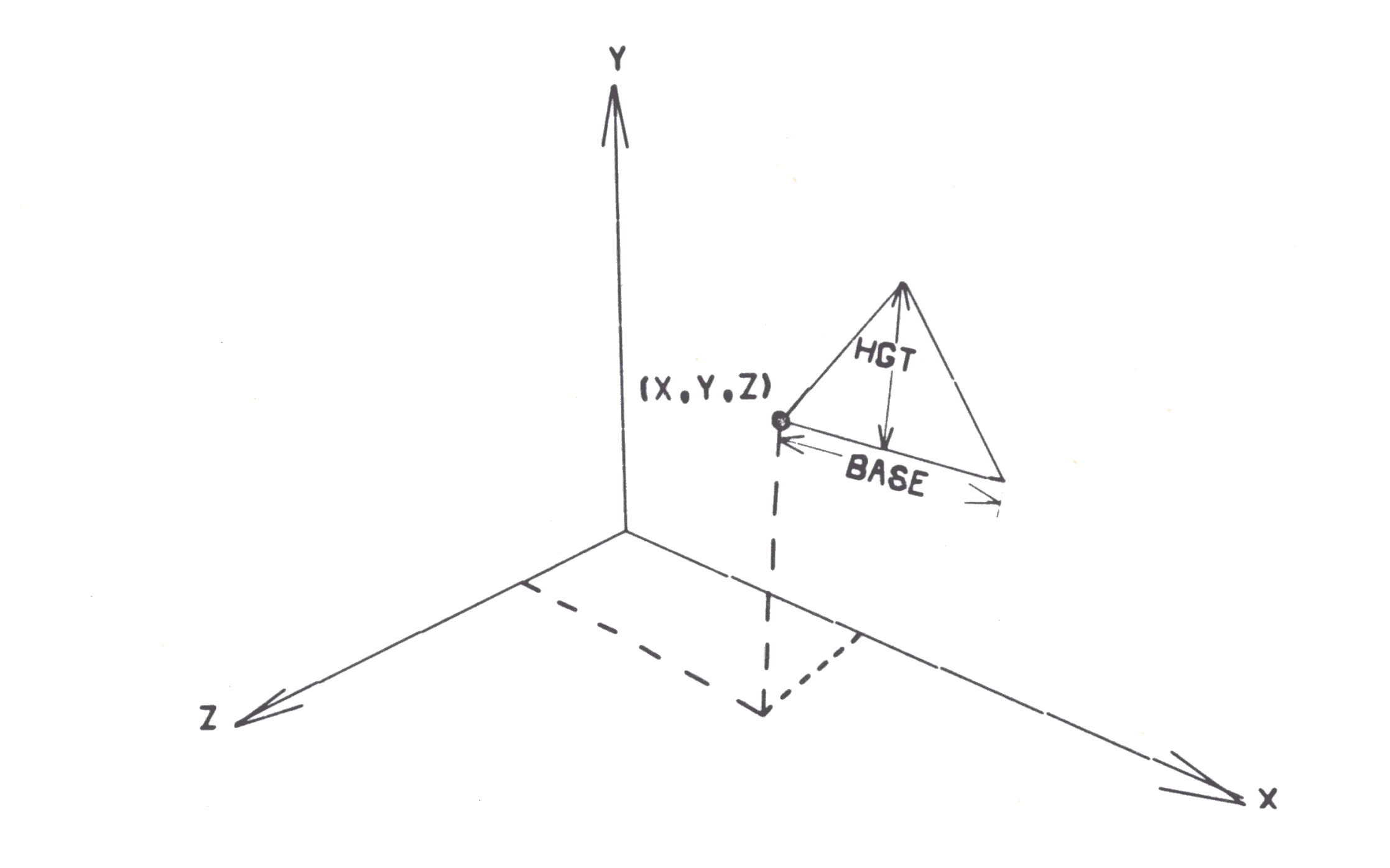
TRNGL S ARR * X Y Z BASE HGT
defines an isosceles triangle with the lower left corner at (X,Y,Z) of base, BASE and height, HGT. The figure lies in a plane parallel to the x-y plane.
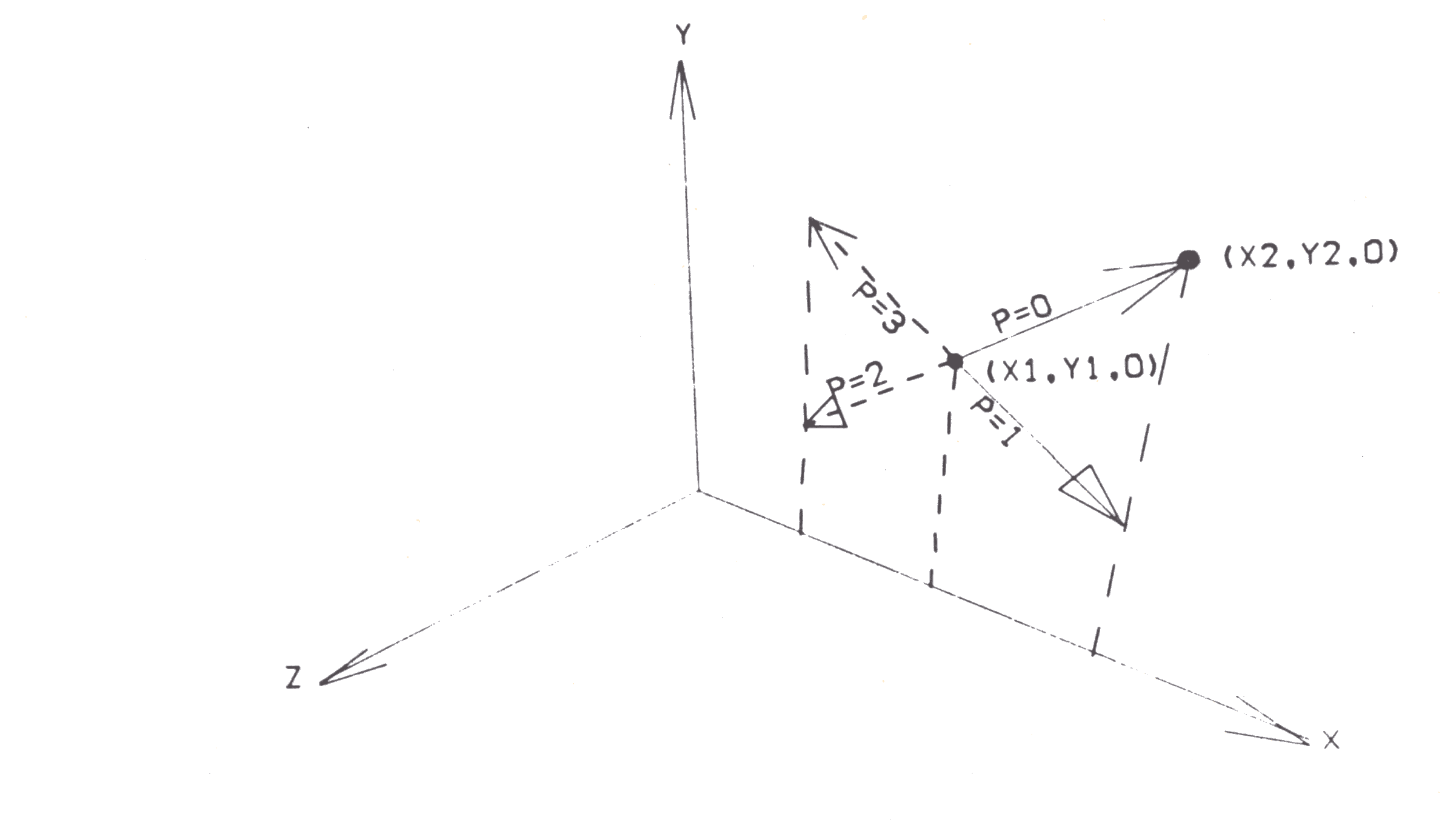
ARROW S ARR P X1 Y1 X2 Y2 HEAD
defines an arrow directed from (X1,Y1,0) to (X2,Y2,0) with a head of length, HEAD. The figure lies in the x-y plane. the use of the parameter, P, is shown in the diagram below.
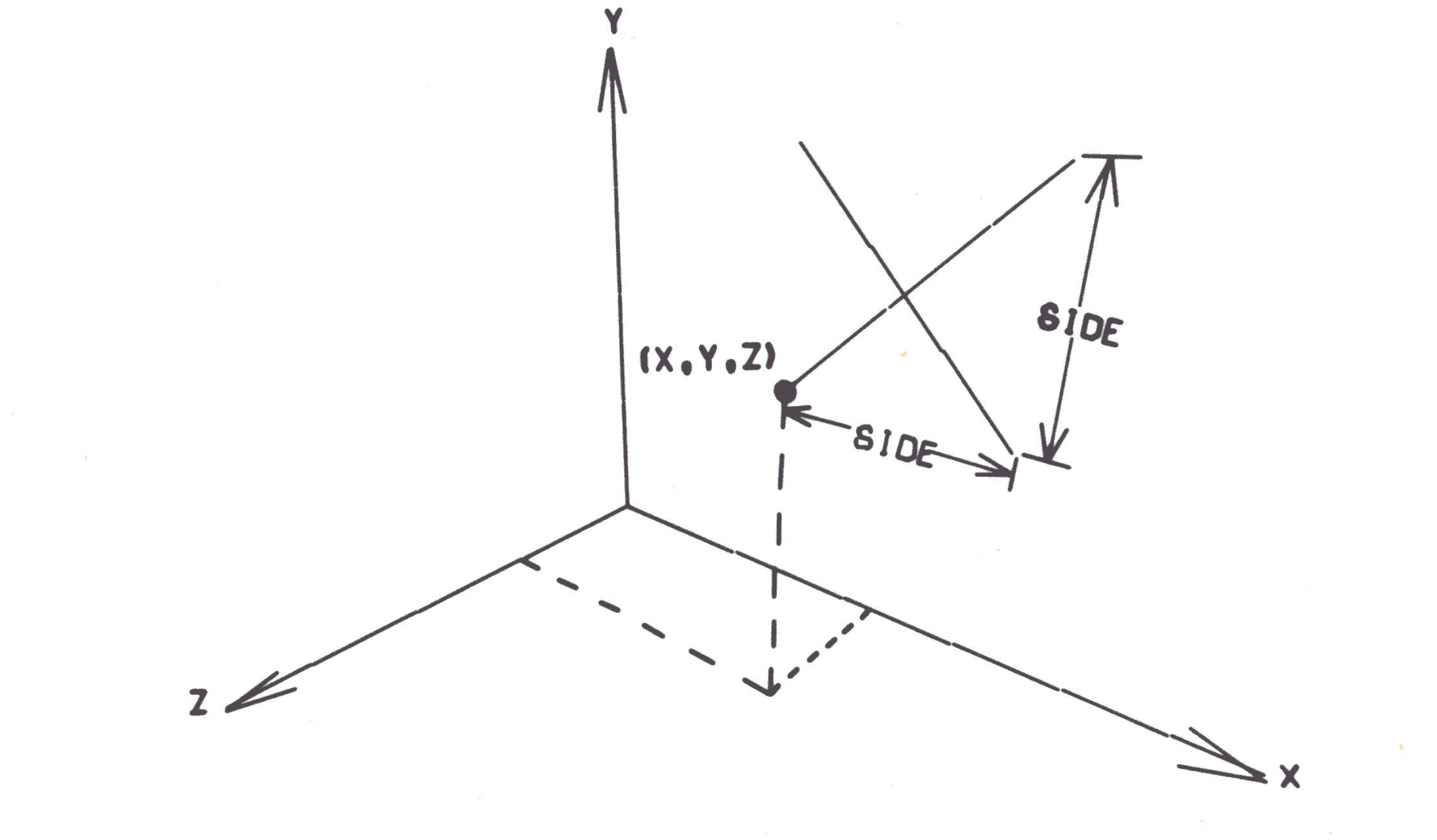
CROSS S ARR * X Y Z SIDE
defines a cross with lower left hand corner a (X,Y,Z) of height and width SIDE. This figure lies in a plane parallel to the x-y plane.
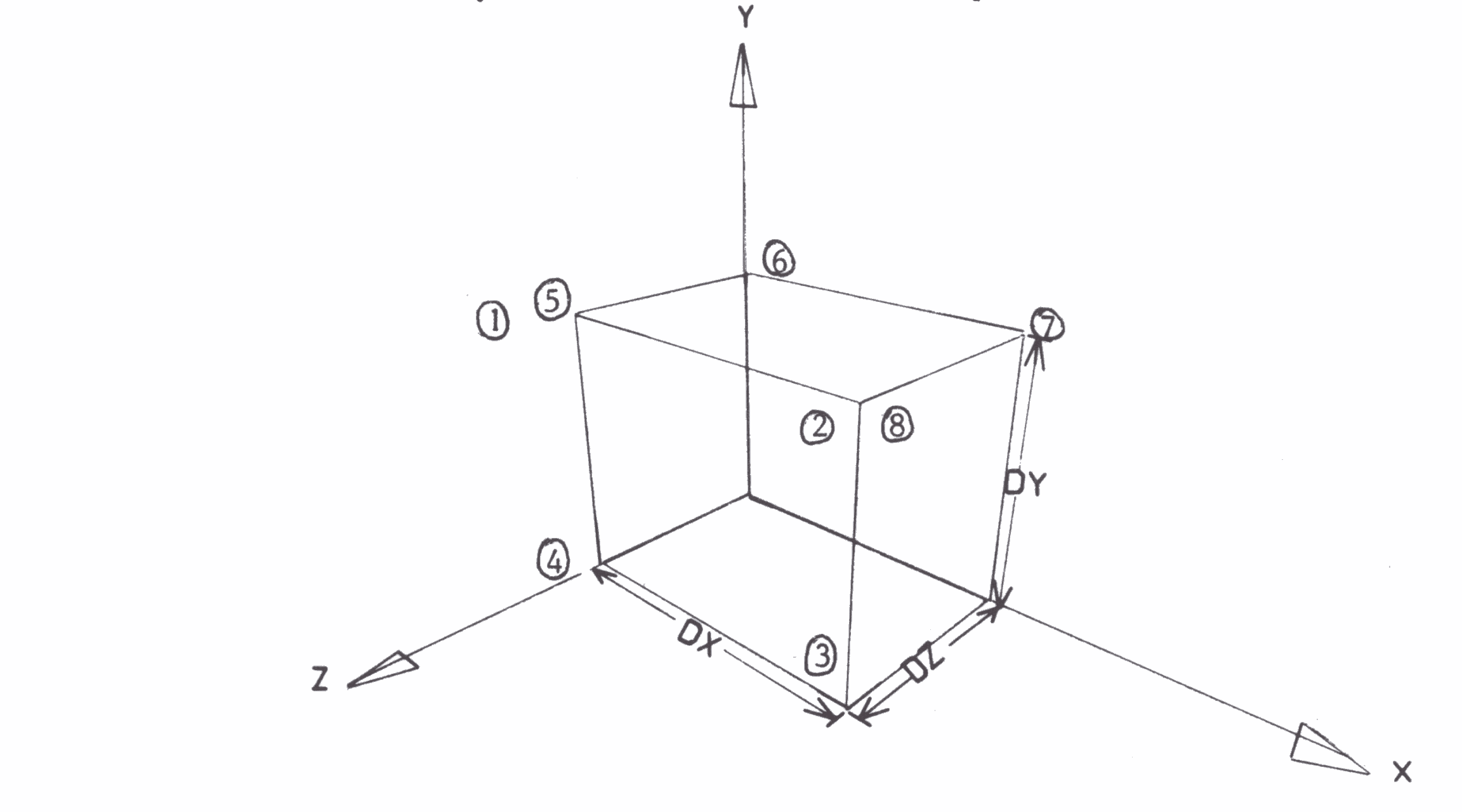
BOX S ARR * DX DY DZ
defines a box with one corner at the origin and sides of length DX, DY and DZ in the positive X, Y and Z directions respectively. The order of points within the array is shown by the circled numbers in the diagram below. If only the top and the front of the box are required, the first 8 points should be transferred into a new array. No more than 8 points should be transferred from a box array except when the whole array is transferred. this is because subarrays are used after the 8th point.
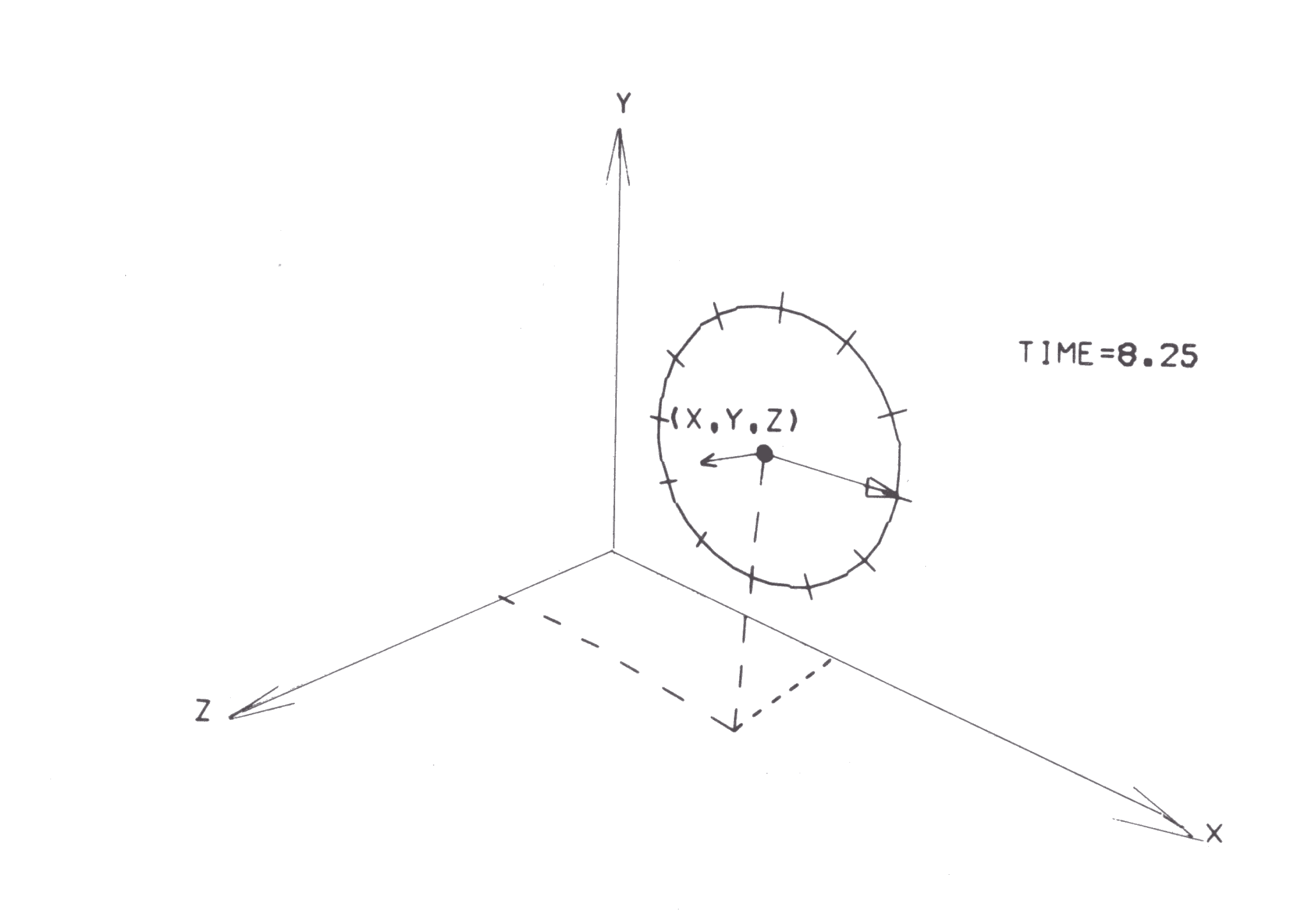
CLOCK S ARR * X Y Z RAD TIME
defines a clock face centred at (X,Y,Z) of radius, RAD, showing the time, TIME. The integer portion of TIME is the hour, and the fraction part is the decimal fraction of an hour. This figure lies in a plane parallel to the x-y plane. Additional figures can be defined out of lines.
SETCV S ARR * X Y Z
defines the first point (X,Y,Z) of a series of points to be connected consecutively by straight lines.
SETLN S ARR * X Y Z
defines the first point (X,Y,Z) of a series of pairs of points which represent a set of unconnected straight lines.
EXPAR S ARR * X Y Z
expands a previously defined SETCV or SETLN array by adding point (X,Y,Z) onto the end. EXPAR can be used as many times as desired, but it should only expand that array which is currently at the end of the stack. SETCV should have at least one EXPAR command following it. SETLN should have an odd number of EXPAR commands following it to make sure that a complete set of pairs of points is defined.
C * * * * * * * * COMMENTS
ERASE S ARR
erases the contents of array ARR of stack S. If ARR is blank or zero the whole stack is erased. This command should be used at the beginning of each new sequence to avoid any carry-over from the previous sequence.
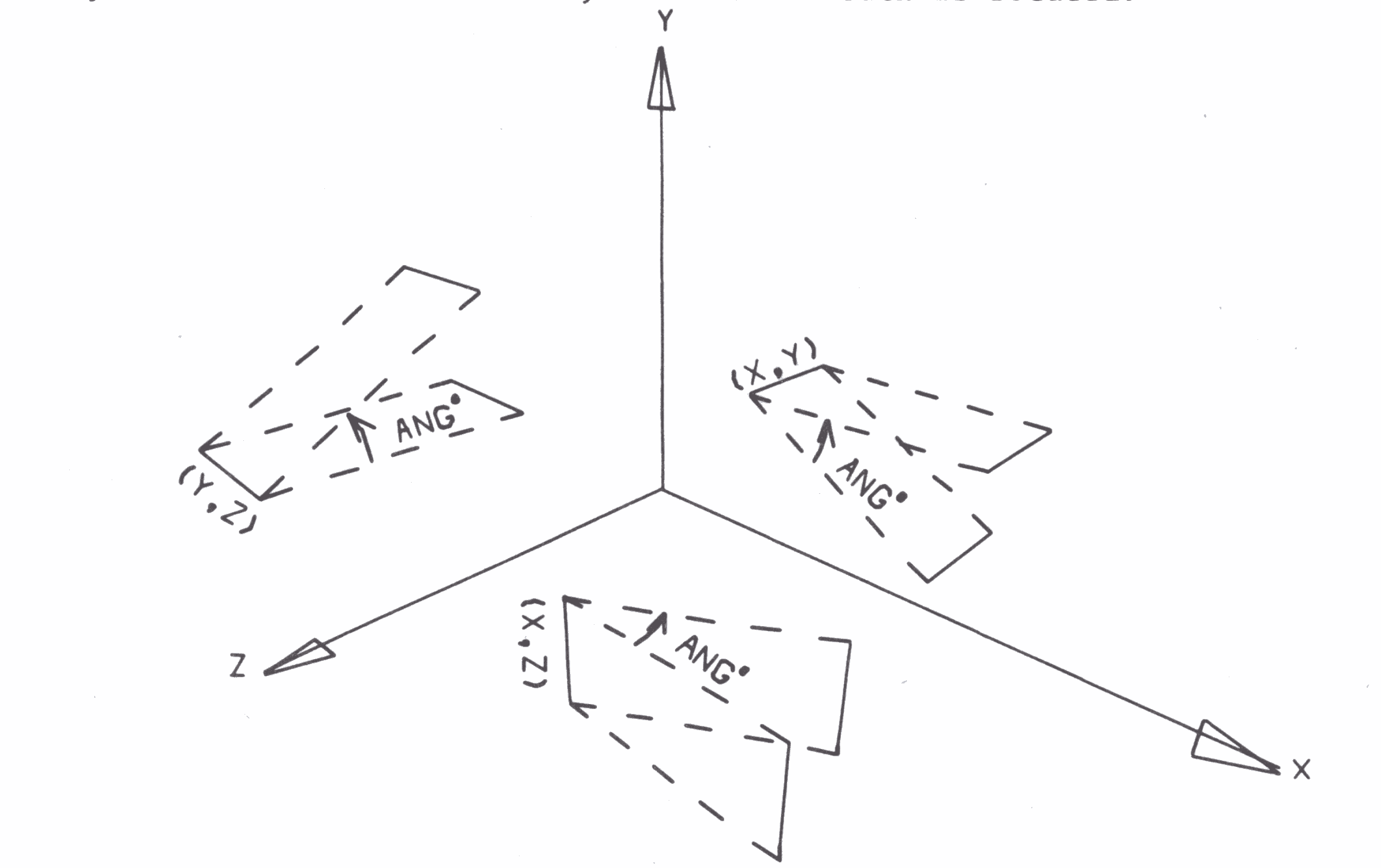
XYROT S ARR * X Y ANG
rotates array ARR of stack S about the line x=X, y=Y by ANG degrees. If ANG is positive, the rotation is counter clockwise as the x-y plane is viewed from the positive Z side. As the rotation is about a line perpendicular to the x-y plane, the Z coordinates are not changed by this rotation. if ARR=0, the entire stack is rotated.
YZROT S ARR * Y Z ANG
rotates array ARR of stack S about the line y=Y, z=Z by ANG degrees. If ANG is positive, the rotation is counter clockwise as the y-z plane is viewed from the positive X side. As the rotation is about a line perpendicular t o the y-z plane, the x coordinates are not changed by this rotation. If ARR=0, the entire stack is rotated.
XZROT S ARR * X Z ANG
rotates array ARR of stack S about the line x=X, z=Z by ANG degrees. If ANG is positive, the rotation is counter clockwise as the x-Z plane is viewed from the positive y side. As the rotation is about a line perpendicular to the x-Z plane, the y coordinates are not changed by this rotation. If ARR=0, the entire stack is rotated.
OFFSET S ARR * DX DY DZ
offsets the points of the array ARR of stack S by DX, DY, DZ in the X, Y and Z directions respectively. DX, DY and DZ can be negative. If ARR=0, the entire stack is offset.
SIZE S ARR * XREF YREF XMAG YMAG
expands or contracts all the points of the array, ARR of stack, S about the reference line, x=XREF, y=YREF. New coordinates are computed by the following relations:
x' = (x-XREF) * XMAG + XREF y' = (y-YREF) * YMAG + YREF
where (x,y) are the first two coordinates of a point in the array. I XMAG and YMAG are greater than one, the points expand about the reference line; if XMAG and YMAG are less than 1, the points contract about the reference line; if XMAG=YMAG=1, the points are unchanged. If XMAG=YMAG=0, all points are set onto the reference line. As long as XMAG and YMAG are equal, the picture merely changes its size without being distorted. If ARR=0, the entire stack is affected. The Z coordinates are unchanged by this command. To reduce or expand a figure in all three directions, use this in conjunction with ZSIZE.
ZSIZE S ARR * ZREF ZMAG
expands or contracts all the pointers of an array about the reference plane z=ZREF. New Z coordinates are computed by the relation:-
z' = (z - ZREF) *ZMAG + ZREF
where z is the third coordinate of a point in the array. ZMAG obeys the same properties as XMAG and YMAG do. To change the size of an array in three dimensions about the point (XREF, YREF, ZREF) use the SIZE command about x=XREF, y=YREF and the ZSIZE command about z=ZREF.
MOVE STA ARRA * STB ARRB
This command is used within a DO LOOP to move in equal increments, a figure whose initial position is stored in stack STA, array ARRA, to a final position which is stored in stack STB, array ARRB.
If both ARRA and ARRB are zero, the entire stack is moved. The parameter NTIMES from the DO instruction determines the total number of equal increments used. After the loop is executed, the stack STA has been set equal to the original value of STB, and stack STB has been destroyed.
TNSFR SB ARRB P P1 P2 SA ARRA BPT1
transfers points P1 to P2 inclusively from array ARRA, stack SA into array ARRB, stack SB. Point P1 of array ARRA will begin loading into array ARRB, starting at point BPT1. If BPT1 is left blank or set to zero, it is assumed to be 1.
If ARRB is a New Array:-
P = 0 all three coordinates are transferred P = 1 only x-coordinates are transferred P = 2 only y-coordinates are transferred P = 3 only z-coordinates are transferred
If ARRB already exists:-
P = 4 all three coordinates are transferred
P = 5 only x-coordinates are transferred
P = 6 only y-coordinates are transferred
P = 7 only z-coordinates are transferred
P = 9 all coordinates of the points in ARRA are transferred from the given
starting point to array ARRB until either all the points P1 to P2 are
transferred, or until the end of the array ARRA is reached, whichever
occurs first. To transfer the whole of an array of unknown size, a
fictitiously high value of P2 can therefore be used.
POINT S ARR * X Y Z PT
replace the PTth point of array ARR of stack S with the new point (X,Y,Z). Array ARR should already have been set up.
DUMP S
prints the contents of the 1000 locations of stack S.
LETER S ARR * * * * * * TEXT
adds up to 20 characters of TEXT into stack S, starting with array ARR. The text is placed in column 61 onwards. If less than 20 characters are required, the > sign can be used to terminate the string. The text is then loaded into stack S, beginning in array ARR, with each new character placed into the next consecutive array and offset 1 unit in the positive x-direction. The first character is located with the lower left hand corner at (ARR-1, 0, 0) and the following characters at (ARR, 0), ARR+1, 0 , 0) and so on. All characters lie in the x-y plane (Z=0).
So far we have implied that the arguments in the class 1 and 2 commands are constant values which define the action of the command. However, it is sometimes useful to be able to define a command which can vary in meaning. CAMPER defines a set of 9 variables, V1 to V9, which can be set to a particular value or manipulated by the class 3 commands. It is possible to replace all arguments other than the stack and parameter arguments by one of the nine variables. Due to limitations in the FORTRAN input/output package (the language in which CAMPER is written), it is not possible to write, for example, V1 in a CAMPER command as only numbers are allowed. Most arguments should be small numbers. Therefore V1 to V9 are represented by the numbers 901.0 to 909.0. For example:-
1 6 9 12 4 21 3 31 3 CIRCL1 10 4.0 4.0 3.0
defines a circle centred at (4.0,4.0) and radius 3.0.
1 6 9 12 4 21 3 31 3 CIRCL1 10 4.0 4.0 901.0
defines a circle centred at (4.0,4.0) and radius equal to the current value of the variable V1. arguments greater than 909.0 will be treated as being in error and will halt the program.
The introduction of variables does not, by itself, increase the flexibility of the system by much. However, there are class 3 commands which allow a set of commands to be repeated a number of times. if these commands depend on the current values of variables, it is possible to achieve quite complex picture manipulations with a few CAMPER commands in a loop.
The class 3 commands have the general format
CMND * * VAR OPRND BGIN END
The argument VAR is in the parameter field and therefore must be a single digit. This defines the particular variable to be used in the operation. A variable used in any other argument position will have the usual representation, ie the constants 901.0 to 909.0.
The two parameters BGIN and END decide whether or not this command is to be executed. if V9 is less than the value of BGIN then the command will not be executed. if END is not blank or zero then the command will only be executed if V9 is less than the value of END.
The two parameters BGIN and END decide whether or not this command is to be executed. If V9 is less than the value of BGIN then the command will not be executed. If END is not blank or zero then the command will only be executed if V9 is less than the value of END
In general, V9 is reserved to mean the loop variable. it is therefore sensible never to set V9 except when it is defined by a loop.
The class 3 commands are as follows:-
ADDV * * VAR OPRND BGIN END
places the contents of variable VAR plus OPRND into VAR
SUBV * * VAR OPRND BGIN END
places the contents of variable VAR minus OPRND into VAR
MULTV * * VAR OPRND BGIN END
places the contents of variable VAR times OPRND into VAR
DIVV * * VAR OPRND BGIN END
places the contents of variable VAR divided by OPRND into VAR
SINV * * VAR OPRND BGIN END
places the sine of OPRND degrees into variable VAR
COSV * * VAR OPRND BGIN END
places the cosine of OPRND degrees into variable VAR
SQRTV * * VAR OPRND BGIN END
places the square root of OPRND into variable VAR
EXPV * * VAR OPRND BGIN END
places eOPRND into variable VAR
DO * * * NTIMES
sets up a loop of commands to be repeated NTIMES iterations. The DO loop should not be more than 100 commands in length.
LOOP
defines the end of the group of commands starting with DO which comprises the loop. Loops cannot be nested, ie one must end before another begins.
LOOP
On obeying the DO command initially, the variable V9 is set to 1. Each time the loop command is encountered, the value of V9 is increased by one and the commands immediately following the DO command are executed again. this continues until the value of V9 is equal to NTIMES when the loop command is executed. In this case the next command obeyed is the one following the LOOP command.
RDRAW S ARR P X Y Z PP NODRW SDRAW S ARR P OVER UP RAD PP NDRAW
Both commands output the perspective trace of the picture contained in array ARR of stack S. If ARR=0, the entire stack is output. In RDRAW, the viewing point is given in Cartesian coordinates as (X,Y,Z). In SDRAW, the viewing point is given in spherical coordinates at OVER degrees from the Z-axis, UP degrees from the x-z plane and a radial distance of RAD from the origin.
The projection plane is located PP units from the viewing point, towards the origin. The figure to be plotted normally lies on the opposite side of the projection plane from the viewing point, since the projected image is then smaller than actual size. If the figure to be plotted lies between the projection plane and the viewing point, the plot will appear larger than actual size. As PP increases, the picture size is magnified, and vice versa. RAD and PP should always be positive. the angles OVER and UP can become negative, if desired.
If NODRW=0, this command is executed, while if NODRW=1 it is ignored. The value of NODRW is usually defined as a variable which changes its value around a loop to start or stop output of this picture.
The parameter P=1 will cause the perspective view of the figure to be tested at the outer border so that any portion of a line lying outside the 9 by 12 cine frame is not drawn. If P=0, no test is done. This feature is quite useful, since the programmer has no prior knowledge of whether the projected lines will spill out of the standard drawing rectangle.
If the solid figure lies within a 10 by 10 by 10 box, a good set of parameters for a 12 by 9 picture window would be OVER=45, UP=35, RAD=26, PP=12, or alternatively X=15, Y=15, Z=15, PP=12.
In the following commands, the 2-D origin referred to is the bottom left hand corner of the plotting area which is normally 12 by 9 in size. The 3-D origin is the location of the (0,0,0) point on the plotting area when the picture is output in perspective on the plotting area.
FRAME
This advances the film by one frame. a new frame is now available for output.
NUORG * * * X Y
This positions the 3-D origin X units over and Y units up from the current 2-D origin. X and Y may be negative if desired. This command is necessary to place the projected picture upon the centre of the plotting surface. Unless NUORG is called the 2-D and 3-D origins are at the same point. It is then likely that the part of the figure in the positive Z direction would spill off the bottom of the plotting area. a good set of values might be X=5, Y=4.
STOP
terminates the CAMPER program and output filemarks on the tape and generates statistics.
SAVE ESAVE REPET
These three commands are used to store picture drawing SD4020 instructions which are to be repeated many times. They save a considerable amount of computing time. SAVE begins storing all drawing and frame advance instructions instead of performing them. Approximately 2500 lines can be saved. If this number is exceeded, an error message is printed, and the program stops. Each time SAVE is obeyed, the previous saved commands are destroyed.
The command ESAVE ends the saving process. any further drawing or frame advance commands are obeyed rather than being saved.
The REPET command performs all the SD4020 instructions that have been stored for NTIMES. For example:-
123456789012345678901234567890 SAVE DRAW 1 0 0.0 DRAW 2 0 0.0 FRAME ESAVE DO 96.0 OFSET3 0 0.1 0.1 WDRAW3 01 REPET 1.0 LOOP
This set of commands saves the stationary figures in stacks 1 and 2 and the advance film. For each iteration, the figure in stack 3 is moved and then output with the stationary information on the next frame.
FRAME
This concludes the current frame of film and moves the film ready for output on the next frame.
STOP
stops the program.
CAMRA * * P
If I=1, the 16mm film camera is selected for output.
If I=2, the hardcopy camera is selected for output.
If I=3, both cameras are selected together.
START
This command is only required by the 1906A and has to be the first instruction input to the system. It does in fact start the program.
